Co to jest modulacja szerokości impulsu
PWM (Pulse Width Modulation), czyli modulacja szerokości impulsu, steruje średnią mocą przez szybkie włączanie i wyłączanie sygnału cyfrowego. Zmienia się czas trwania stanu wysokiego w jednym okresie.
Co to jest wyjście PWM
Wyjście PWM to pin lub kanał generujący przebieg prostokątny o określonej częstotliwości i wypełnieniu. W mikrokontrolerach robi to zwykle timer sprzętowy.
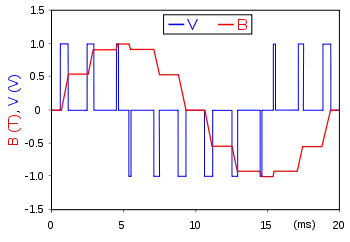
Co to jest PWM - przykład sygnału PWM w sterowaniu obciążeniem indukcyjnym.
Współczynnik wypełnienia
Kluczowym parametrem PWM jest współczynnik wypełnienia. Określa on, jaką część okresu sygnał spędza w stanie wysokim. Dla 25% impuls jest aktywny przez jedną czwartą okresu.
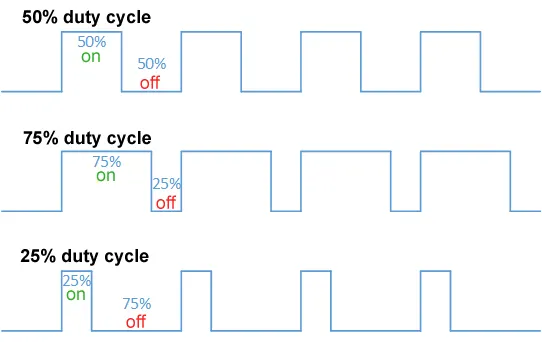
Rysunek współczynnika wypełnienia.
Przy wypełnieniu 50% sygnał jest włączony przez połowę okresu i wyłączony przez drugą połowę. Taki przebieg jest falą prostokątną o równych czasach obu stanów.
Gdy wypełnienie rośnie powyżej 50%, średnia moc rośnie. Gdy spada poniżej 50%, odbiornik dostaje mniej energii.
Wypełnienie 0% oznacza sygnał stale wyłączony, a 100% - stale włączony. Wartości pośrednie dają efekt zbliżony do regulacji analogowej.
Częstotliwość sygnałów PWM
Częstotliwość PWM to liczba okresów w sekundzie. Dla diod LED musi eliminować migotanie; dla silników dobiera się ją pod kątem hałasu, sprawności i strat przełączania.
Zastosowania PWM
Generowanie prostych sygnałów dźwiękowych.
Regulacja jasności diod LED i innych źródeł światła.
Sterowanie mocą elementów grzejnych.
Sterowanie tranzystorami i innymi elementami przełączającymi.
Zastępowanie mniej sprawnych regulatorów liniowych w prostych układach mocy.

Regulator napięcia i kontroler prędkości PWM.
Kodowanie informacji w prostych systemach komunikacyjnych.
Sterowanie serwomechanizmami oraz obciążeniami o bezwładności mechanicznej.
Regulacja mocy w piecach i grzałkach elektrycznych.
Sterowanie głośnością lub amplitudą sygnału po filtracji.
Uzyskiwanie napięcia zbliżonego do analogowego po zastosowaniu filtru RC lub aktywnego filtru dolnoprzepustowego.
Technologia modulacji szerokości impulsu
Pin mikrokontrolera rzadko zasila obciążenie bezpośrednio. Sygnał PWM steruje tranzystorem, mostkiem H, sterownikiem bramki albo układem LED/servo.
Funkcje PWM
PWM daje wysoką sprawność, prostą regulację cyfrową i dobrą powtarzalność. Ograniczeniem są zakłócenia przełączania, dobór częstotliwości i ewentualna filtracja.
W jaki sposób używa się technologii PWM
PWM stosuje się albo do bezpośredniego sterowania obciążeniem, albo do wytwarzania sygnału uśrednionego przez filtr.
Modulacja szerokości impulsu
Prosty regulator PWM można zbudować z tranzystorów, potencjometru i kilku elementów biernych. Przy obciążeniach mocy trzeba sprawdzić prąd, temperaturę tranzystora i zabezpieczenia.
Wymagane materiały
Rezystor 22 kOhm.
Potencjometr 10 kOhm.
Tranzystory BC338 i BC557.
Rezystor 220 Ohm.
Rezystor 47 Ohm.
Kondensator 100 uF / 60 V.
Schematy obwodów
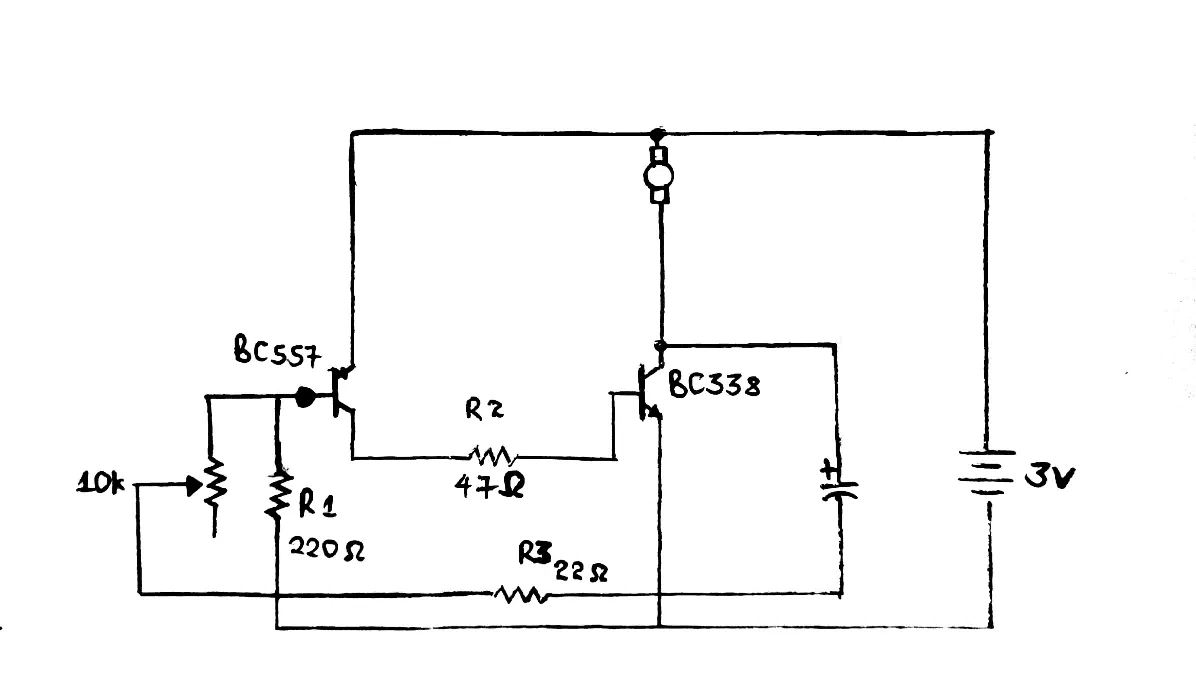
Schemat tranzystorowego regulatora PWM.
Kontrola prędkości
Prędkość silnika DC reguluje się zmianą wypełnienia sygnału podawanego na tranzystor mocy. Większe wypełnienie zwykle oznacza większą prędkość.
Uwaga
Przy silnikach i innych obciążeniach indukcyjnych dodaj diodę zabezpieczającą lub układ tłumiący przepięcia. Bez tego tranzystor może ulec uszkodzeniu.
Płytka sterownika PWM I2C
Gdy potrzebnych jest wiele kanałów, wygodny jest sterownik I2C, na przykład PCA9685. Generuje sygnały niezależnie od mikrokontrolera.
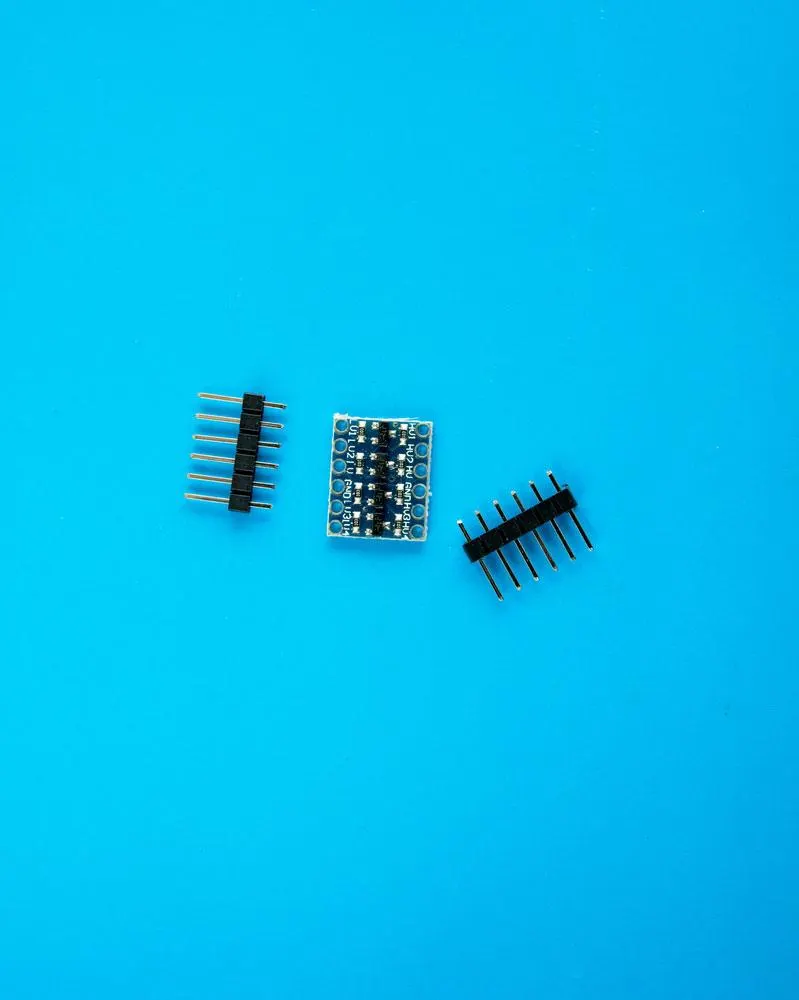
Szesnastokanałowy sterownik PWM I2C.
Ma wbudowany generator zegara i utrzymuje sygnały bez ciągłego odświeżania.
Wyjścia pracują jako otwarty dren lub push-pull.
Częstotliwość PWM można ustawiać zwykle do około 1,6 kHz.
Układ współpracuje z logiką 3,3 V i 5 V, a V+ zasila obciążenia do około 6 V.
Wejście OE pozwala szybko wyłączyć wszystkie kanały.
Moduły są dostępne w wersjach zgodnych z RoHS.
Sześć linii adresowych pozwala podłączyć do 62 modułów.
Każdy kanał ma 12 bitów rozdzielczości. Przy 60 Hz krok trwa około 4 us.
Zielona dioda LED sygnalizuje obecność zasilania wyjść.
Zielona dioda LED na płytce PWM.
Złącza magistrali ułatwiają łączenie modułów.
Płytka ma osobne wejście zasilania mocy.
Zworki pozwalają ustawić adres I2C.
Na linii V+ można dodać kondensator filtrujący.
Rezystory 220 Ohm na wyjściach ograniczają prądy sygnałowe.
Wejście zasilania warto zabezpieczyć przed odwrotną polaryzacją.
Trzypinowe złącza pozwalają obsłużyć 16 serw jednocześnie.
Arduino PWM — sterownik ładowania
PWM sprawdza się też w sterowniku ładowania. Arduino mierzy napięcia przez dzielniki i steruje MOSFET-em.
Wymagane elementy
Tranzystor MOSFET, na przykład IRF540.
Rezystory 10 kOhm, 4,7 kOhm, 1 kOhm i 330 Ohm.
Kondensator 100 uF / 35 V.
Tranzystor NPN 2N3904 lub odpowiednik.
Płytka prototypowa.
Wyświetlacz LCD 16 x 2 znaki.
Czerwona i zielona dioda LED.
Dioda Zenera 11 V, na przykład 1N4741A.
Dioda prostownicza 1N4007.
Arduino UNO.
Złącze śrubowe.
Przewody połączeniowe.
Płytka perforowana.
Bezpiecznik 5 A oraz oprawka bezpiecznika.
Obudowa projektu.
Miejsce montażu dla instalacji solarnej.
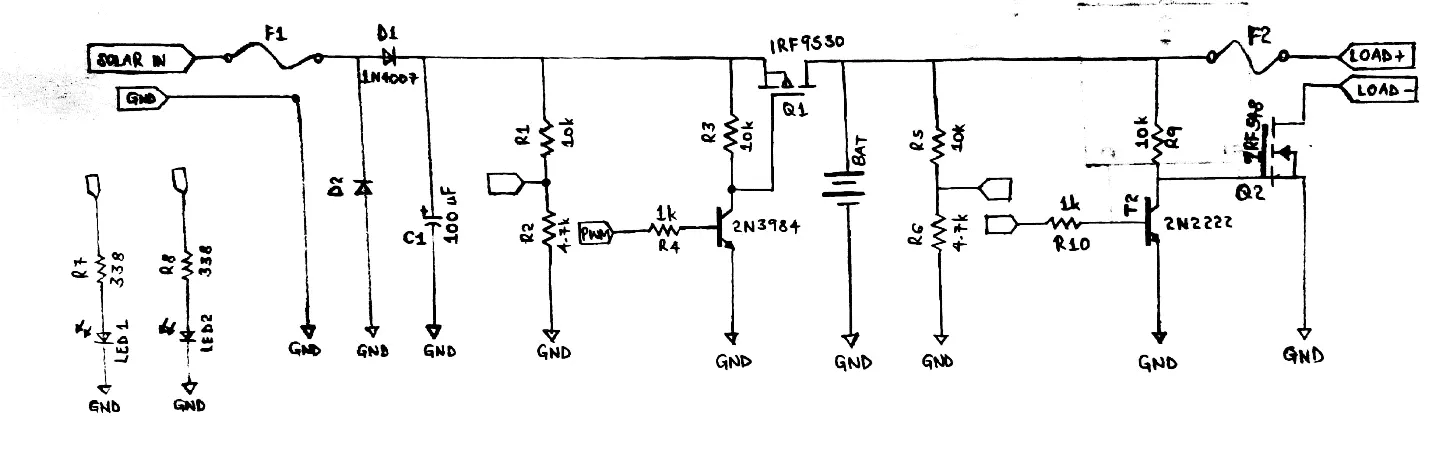
Schemat obwodu kontrolera ładowania Arduino PWM.
Energia z panelu słonecznego trafia do układu przez diodę D1.
Dioda Zenera D2 ogranicza przepięcia na wejściu.
Kondensator C1 tłumi szumy, a dzielnik R1/R2 mierzy napięcie panelu.
Wyjście dzielnika trafia na wejście analogowe A0 Arduino.
Pin 6 Arduino generuje PWM dla tranzystora MOSFET Q1.
R3 ustala stan bramki MOSFET-a.
Po włączeniu MOSFET-a prąd ładuje akumulator.
Dzielnik R5/R6 mierzy napięcie akumulatora i podaje je na A1.
T2 steruje MOSFET-em Q2, który załącza obciążenie. W prostym układzie można użyć przekaźnika.
Bezpieczniki F1 i F2 chronią przed nadmiernym prądem.
Zielona LED2 i czerwona LED1 sygnalizują stan układu; podłącza się je do pinów 8 i 7 przez rezystory.
Podsumowanie
PWM to podstawowa technika sterowania w elektronice. Reguluje moc, jasność, prędkość i położenie sygnałem cyfrowym.
OurPCB wykonuje prototypy, montaż SMT/THT i produkcję płytek; wycena w 12 godzin roboczych.