Czym jest Motor Driver? Silnik to urządzenie elektroniczne, które pomaga przekształcić energię elektryczną w energię mechaniczną. Dlatego sterownik silnika pozwala na prowadzenie prac automatycznych przy użyciu energii elektrycznej. Mamy kilka różnych rodzajów silników elektrycznych. Do tych typów należą silniki prądu stałego, silniki krokowe i serwomotory. Ich zasady działania i charakterystyka są czynnikami różnicującymi te silniki. Wybór odpowiedniego typu sterownika silnika jest istotne, ponieważ pozwala na efektywną pracę silnika z mikrokontrolerem wyboru. Ten artykuł pomoże Ci zrozumieć, jak działa sterownik silnika, jakie są jego cechy, rodzaje oraz niezbędne elementy podczas wykonywania połączeń. Zaczynajmy!
Co to jest sterownik silnika?
Z nazwy, sterownik silnika oznacza urządzenie, które napędza silniki. Jednak układy sterownika silnika nie mogą być silnikiem bez mikrokontrolera.
Sterownik silnika pokazuje się jako interfejs między silnikiem i mikrokontrolerem. Powodem jest to, że mikrokontroler i silnik pracują na różnych zakresach napięć. Silnik będzie zużywał wyższy poziom prądu niż mikrokontroler.
Moduł sterownika silnika jest potrzebny przy podłączaniu do napięcia zasilającego dwóch urządzeń, które pracują na różnych poziomach prądu. W tym przypadku silnik działa jako trzecie urządzenie, które zwiększa lub zmniejsza napięcie zasilania.
Większość sterowników silnika na rynku są teraz w postaci układów scalonych. Istnieją różne sterowniki silników, dlatego też mają one inne właściwości. Następnie podłączasz te sterowniki silnika IC do sterownika silnika poprzez obwód mostka H.
(Arduino-jak mikrokontroler)
Krytyczne cechy sterowników silników
Kompatybilne silniki
Niemożliwe jest znalezienie napędów silnikowych, które pasują do wszystkich silników elektrycznych. Niektórzy producenci wykonują sterowniki silników specjalnie dla określonych typów silników. Jednak producenci ułatwiają sprawę, ponieważ dostarczają listę wszystkich kompatybilnych silników do sterowników silników.
Co warte podkreślenia, większość sterowników jest kompatybilna z silnikiem DC i krokowym. Jednak silnik serwo zasługuje na więcej zapału przy wyborze sterownika silnika.
Interfejs
Wiele napędów silnikowych działa doskonale po umieszczeniu na interfejsie płytki sterownika Arduino. Jednak niektóre projekty bezprzewodowe wymagają bezprzewodowego sterownika silnika. Na przykład, płyta sterownika Bluetooth jest dobrą płytą sterującą dla projektu bezprzewodowego.
Napięcie i prąd
Napięcie i prąd to najważniejsze cechy, których należy szukać w idealnym sterowniku silnika. Podczas pracy nad projektem powinieneś już wiedzieć, jakiej wartości napięcia zasilania i prądu roboczego wymaga Twój projekt. Sterownik, którego zamierzasz użyć, powinien spełniać niezbędny poziom funkcjonalności.
(część projektu Arduino).
Główne komponenty napędzane silnikiem
Potrzebujesz serwomotoru, sterownika, zasilacza i niezbędnych połączeń dla serwomotoru. Dla silnika dc, potrzebujesz kontrolera, obwodu sterownika silnika, silnika DC, zasilacza i niezbędnych bezpośrednich połączeń.
Kontroler ten może być mikrokontrolerem lub mikroprocesorem. Obwód kontrolny sterownika silnika jest wzmacniaczem prądu, który stopniuje prąd z mikrokontrolera pomagając napędzać silnik.
Ponadto, silnik powoduje ruch. Proces interakcji silnika ze sterownikiem, silnikiem bezszczotkowym i krokowym często wymaga zastosowania sterownika napędu silnika. Ponadto zasilacz dostarcza do silnika tylko wymagany prąd.

(silnik elektryczny krokowy)
Różne rodzaje sterowników silników
Rozróżniamy sterowniki w zależności od rodzaju sterowania, jakie zapewniają. Na przykład, niektóre zapewniają sterowanie bez prędkości, podczas gdy inne oferują sterowanie z dużą prędkością. W szczególności, jeden silnik może korzystać z różnych typów sterowników. Jednak niektóre specyficzne sterowniki działają dla pojedynczego silnika. Poniższa tabela przedstawia to zjawisko.
| Silnik | Sterownik silnika |
|---|---|
| Silnik krokowy | A4988, L293, DRV8833, ULN2003 |
| Silnik prądu stałego | A4988, L293, DRV8833 |
| Serwomotor | L293 |
(zbliżenie serwomotoru).
Jak działa sterownik silnika?
Najpierw mikrokontroler wysyła sygnały do silnika. Następnie otrzymane znaki są interpretowane i stopniowane w silniku po ich zakończeniu. Silnik posiada dwa piny wejściowe napięcia. Pin pierwszy włącza sterownik, natomiast pin drugi podaje napięcie do silnika poprzez IC silnika.
Jeśli mikroprocesor przekaże wysokie wejście do układu scalonego sterownika, układ scalony sterownika wyśle takie samo wejście. W związku z tym wyjaśnia to, że układ scalony nie zmienia rodzaju sygnału, który otrzymuje.
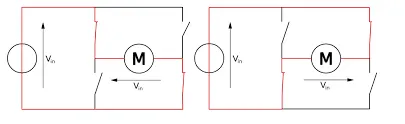
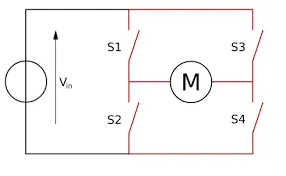
(gdy silnik porusza się w kierunku zgodnym z ruchem wskazówek zegara) (gdy silnik porusza się w kierunku przeciwnym do ruchu wskazówek zegara).
Źródło: Wiki Commons
Aby silnik obracał się zgodnie z ruchem wskazówek zegara, przełączniki S2 i S3 są otwarte, podczas gdy przełączniki S1 i S4 są zamknięte. Następnie S1 pozwoli, aby jego napięcie przepłynęło przez silnik bezpośrednio do S4. Podczas tego przepływu prądu, obwód staje się w pełni kompletny. Dalej, prąd ten będzie płynął z punktu V do punktu M przez przełączniki S1 i S4. W rezultacie silnik pozostaje włączony i obraca się zgodnie z ruchem wskazówek zegara.
Najpierw podajemy przełącznikom napięcie wejściowe. W wyniku tego przełączniki S1 i S4 ostatecznie się zamykają. Ponadto tworzy to połączenie dodatnie, ponieważ łączymy dwa równoległe przełączniki. W konsekwencji silnik będzie się obracał w kierunku przeciwnym do ruchu wskazówek zegara. Z drugiej strony, aby silnik obracał się w ostrości przeciwnej do ruchu wskazówek zegara, aktywujemy przełączniki S3 i S2.
(układ scalony).
Dlaczego potrzebny jest sterownik silnika?
Przede wszystkim sterownik jest konieczny, ponieważ mikrokontroler wymaga napięcia o niższym poziomie niż silniki. Z tego powodu nie możemy dostarczyć zasilania bezpośrednio z mikrokontrolera do silnika. W tym momencie potrzebujemy sterownika silnika pomiędzy tymi elementami elektrycznymi. Sterownik zwiększa prąd z mikroprocesora, aby dopasować go do prądu silnika.
Co to jest obwód mostka H?
Łączenie dwóch par tranzystorów w obwodzie tworzy obwód w kształcie litery "H", który nazywamy mostkiem H.
Na przeciwległym końcu silnika umieść każdą parę tranzystorów o innej funkcjonalności. Jeden zespół otrzymuje napięcie wejściowe, natomiast druga para pozostaje uziemiona.
(obwód w kształcie mostka H.)
Podczas dodatniej polaryzacji przełączaj po kolei jedną parę tranzystorów. Teraz prąd płynie od napięcia źródłowego do zacisku dodatniego. Następnie prąd z zacisku +VE płynie do zacisku -VE, który w końcu płynie do masy.
Jednak podczas ujemnej polaryzacji dzieje się odwrotnie i włącza się druga para tranzystorów. Najpierw prąd z napięcia źródłowego popłynie prosto do zacisku ujemnego. Następnie prąd z terminala ujemnego płynie prosto do terminala dodatniego, po czym znajduje drogę do masy.
Ten naprzemienny przepływ prądu tworzy obwód mostka H.
(zdjęcie tranzystorów).
Jak zbudować obwód sterownika silnika
Aby zbudować obwód napędowy, potrzebne są następujące materiały
9V Cell Recreator
Arduino UNO
-Koło
Rzeczywiste silniki prądu stałego
Zwijanie przewodów
Płyty z chleba
Napęd L293D to 16-kanałowy napęd silnikowy On ma Cztery uziemione styki, cztery styki wejściowe, cztery styki wyjściowe, dwa styki i dwa styki napięcia
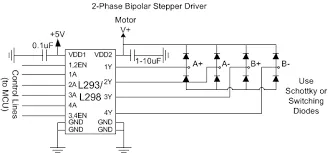
(Obwód napędzany silnikiem silnikowym L293D z silnikiem krokowym) Jesteś pewien
Aby zbudować obwód, należy postępować zgodnie z ilustracją powyżej i upewnić się
Po pierwsze, bezpiecznie podłącz sworzeń enable do Arduino za pomocą sworznia 5v
Po drugie, terminal dodatni baterii powinien być podłączony do obwodu zintegrowanego, natomiast terminal ujemny jest uziemiony przez ośmiu styków (GND)
Ponadto wkładki uziemiające powinny być zawsze krótkie i przymocowane do GND (Ground Pin) na płycie Arduino
Wyciąg informacyjny
Napędy elektryczne mają kluczowe znaczenie dla utrzymania poziomu logicznego w obwodzie W miarę postępu technologicznego silniki stają się bardzo popularne
Mamy nadzieję, że ten artykuł ci pomoże W przypadku pytań lub usług dotyczących tego artykułu lub jakichkolwiek z naszych artykułów należy skontaktować się z nami.