Pixhawk 4-W najprostszym ujęciu, kontrolery lotu to płytki drukowane z elektronicznymi chipami. Urządzenia te są pełne inteligentnego oprogramowania i sprzętu do efektywnej kontroli i monitorowania danych lotu drona. Zasadniczo jest to mózg drona, i podobnie jak mózgi we wszystkich żywych organizmach, rozmiar, wydajność i złożoność kontrolera są różne. Jednym z najbardziej zaawansowanych kontrolerów lotu jest Pixhawk 4. Zaprojektowany dla komercyjnych i akademickich deweloperów, oparty na otwartym projekcie sprzętowym FMUv5 Pixhawk-project, jest najnowszym urządzeniem w linii, co oznacza, że posiada najlepszą technologię. Przyjrzymy się szczegółowo temu kontrolerowi lotu oraz temu, jak go okablować do użytku.
Czym jest kontroler lotu Pixhawk 4?
Jako najnowsza aktualizacja w bardzo udanej rodzinie kontrolerów lotu Pixhawk, Pixhawk 4 jest produktem połączonych wysiłków zespołu PX4 i Holybro. Zoptymalizowany do pracy z pełnym stosem Dronecode i preinstalowany z najnowszym firmware PX4, kontroler posiada następujące technologie.
Zaawansowana technologia procesorowa ST Microelectronics
Technologia czujników InvenSense i Bosch
System operacyjny czasu rzeczywistego NuttX
Funkcje te zapewniają doskonałą wydajność, niezawodność i elastyczność sterowania dronem, ponieważ mogą obsługiwać złożone algorytmy.
W porównaniu z wcześniejszymi wersjami, Pixhawk 4 posiada większą moc obliczeniową i zasoby pamięci RAM do uruchamiania bardziej złożonych aplikacji oraz niskoszumowe, wysokowydajne jednostki IMU do celów stabilizacji.

Człowiek steruje latającym dronem
Sparuj to z wszystkimi pokładowymi interfejsami, a otrzymasz idealny zestaw rozwojowy autopilota do badań i rozwoju w laboratoriach, startupach, środowiskach akademickich, itp.
Specyfikacja i funkcje Pixhawk 4

Pixhawk
Źródło: Wikimedia Commons.
Pixhawk 4 posiada następujące cechy i specyfikacje techniczne:
Główny procesor FMU.
Mikrokontroler STM32F765 (32 Bit Arm Cortex-M7, 216MHz, 2 MB pamięci, 512KB RAM)
IO Processor
STM32F100 (32 Bit Arm Cortex-M3, 24MHz, 8KB SRAM)
Czujniki/IMU na pokładzie
ICM20689 Accel/Gyro
BMI055 lub ICM20602 Accel/Gyro
IST8310 Magnetometer
MS5611 Barometer
GPS (zintegrowany magnetometr IST8310 i odbiornik GPS/GLONASS u-blox Neo-M8N)
Interfejsy
8-16 wyjść PWM (osiem IO, osiem FMU)
Trzy dedykowane wejścia PWM/ przechwytywania FMU
Wejście CPPM dedykowane R/C
Dedykowane wyjście S.BUS dla serwomechanizmów
Dedykowane wejście Spektrum R/C/ S.BUS i DSM z wejściem analogowym/ PWM RSSI
Pięć portów szeregowych (ogólnego przeznaczenia)
Dwa z pełną kontrolą przepływu
Oddzielny z limitem 1,5A
Cztery magistrale SPI
Szybka magistrala SPI dla czujników, zawierająca sześć DRDY i cztery selektory układów.
Jedna niskoszumowa magistrala dla barometru z dwoma selektorami układów scalonych
Dedykowana magistrala dla pamięci FRAM obsługująca kalibrację SPI pamięci EEPROM w module czujnika
Zewnętrzna magistrala SPI
Trzy porty I2C
Podwójne magistrale CAN dla podwójnych gniazd CAN z szeregowym ESC
Każdy z nich z indywidualnym sterowaniem cichym/sterowaniem ESC RX-MUX
Analogowe wejścia napięcia baterii dla dwóch baterii
Dwa dodatkowe wejścia analogowe
Podłączenie zasilania
Wejście szyny serwomechanizmu: 0V-36V
Wejście USB: 4.75V-5.25V
Moduł wyjściowy: 4,9V-5,5V
Maksymalne napięcie wejściowe: 6V
Maks. prąd wyczuwalny: 120A
Temperatura pracy: 40-85°C
Mała obudowa (84mm x44mm x12mm)
Waga: 15,8 gramów
Inne cechy
Gniazdo kart MicroSD
Zewnętrzny brzęczyk
Zewnętrzny przycisk bezpieczeństwa
Monitorowanie szyny serwomechanizmu i napięcia Vcc
Zintegrowana izolacja wibracji
Układ pinów Pixhawk 4
Ten kontroler lotu posiada następujące 17 pinów.
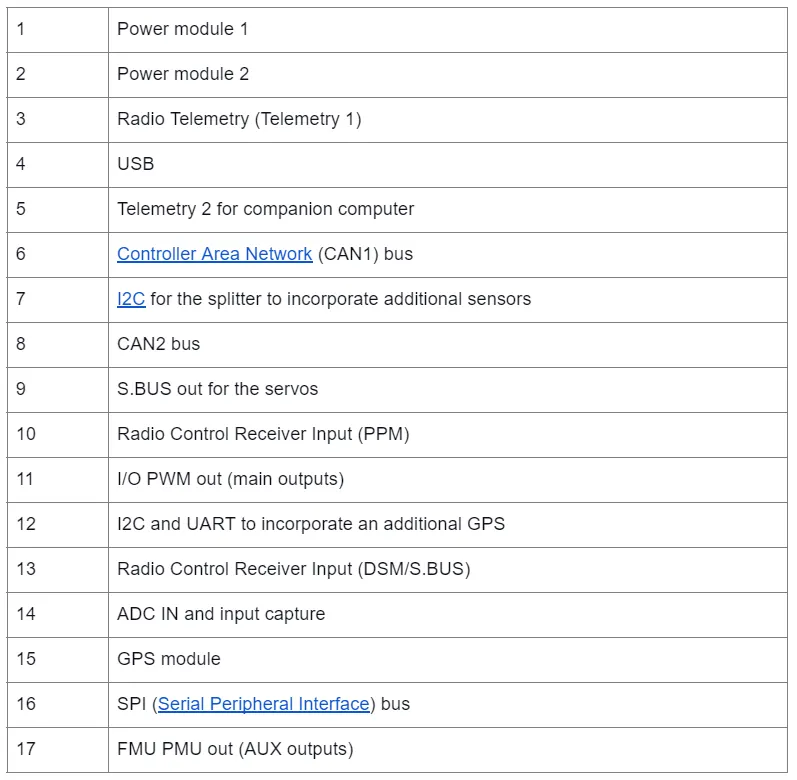
Oprócz nich na bokach kontrolera znajduje się gniazdo micro-USB, gniazdo kart SD, przycisk resetowania I/O oraz przycisk resetowania FMU.
Szybki start z okablowaniem Pixhawk 4
Ponieważ posiada on wiele czujników i urządzeń peryferyjnych, oto jak okablować kontroler lotu Pixhawk 4.
Przegląd schematu okablowania
Najpierw użyj 6-żyłowego kabla, aby skierować prąd z baterii LiPo do Power Management Board, aby zasilić autopilota. Następnie podłącz odbiornik sterowania radiowego DSM, PPM lub SBUS, aby zasilić autopilota w trybie lotu wspomaganego lub ręcznego.
Następnie użyj kabla 10-wire do połączenia Power Management Board, aby wysłać sygnały do silników. Podłącz również dostarczony moduł GPS, aby dostarczyć dane pozycyjne do autopilota podczas lotu.
Radio telemetryczne jest opcjonalne do odbioru danych ze stacji kontroli naziemnej, aby komunikować się z autopilotem podczas lotu.
Montaż i orientacja kontrolera
Najpierw zamontuj kontroler do ramy drona używając dołączonych podkładek piankowych dla izolacji drgań. Następnie ustaw Pixhawk 4 blisko środka ciężkości pojazdu i umieść go górną stroną do góry ze strzałką skierowaną w stronę przodu drona.
Możesz napotkać ograniczenia przestrzeni na ramie, które uniemożliwiają montaż w tej orientacji. Jeśli tak się stanie, dopasuj kontroler do dostępnej przestrzeni, a następnie ponownie skonfiguruj autopilota.
GPS + kompas + brzęczyk + wyłącznik bezpieczeństwa + dioda LED
Po zamontowaniu kontrolera, podłącz dostarczony GPS (zintegrowany z wyłącznikiem bezpieczeństwa, kompasem, diodą LED i brzęczykiem) do gniazda modułu GPS. Zamontuj ten moduł na ramie drona, ale daleko od innej elektroniki, aby zapobiec zakłóceniom. Element ten posiada również znacznik kierunku, po zamontowaniu powinien być skierowany w stronę przodu pojazdu.
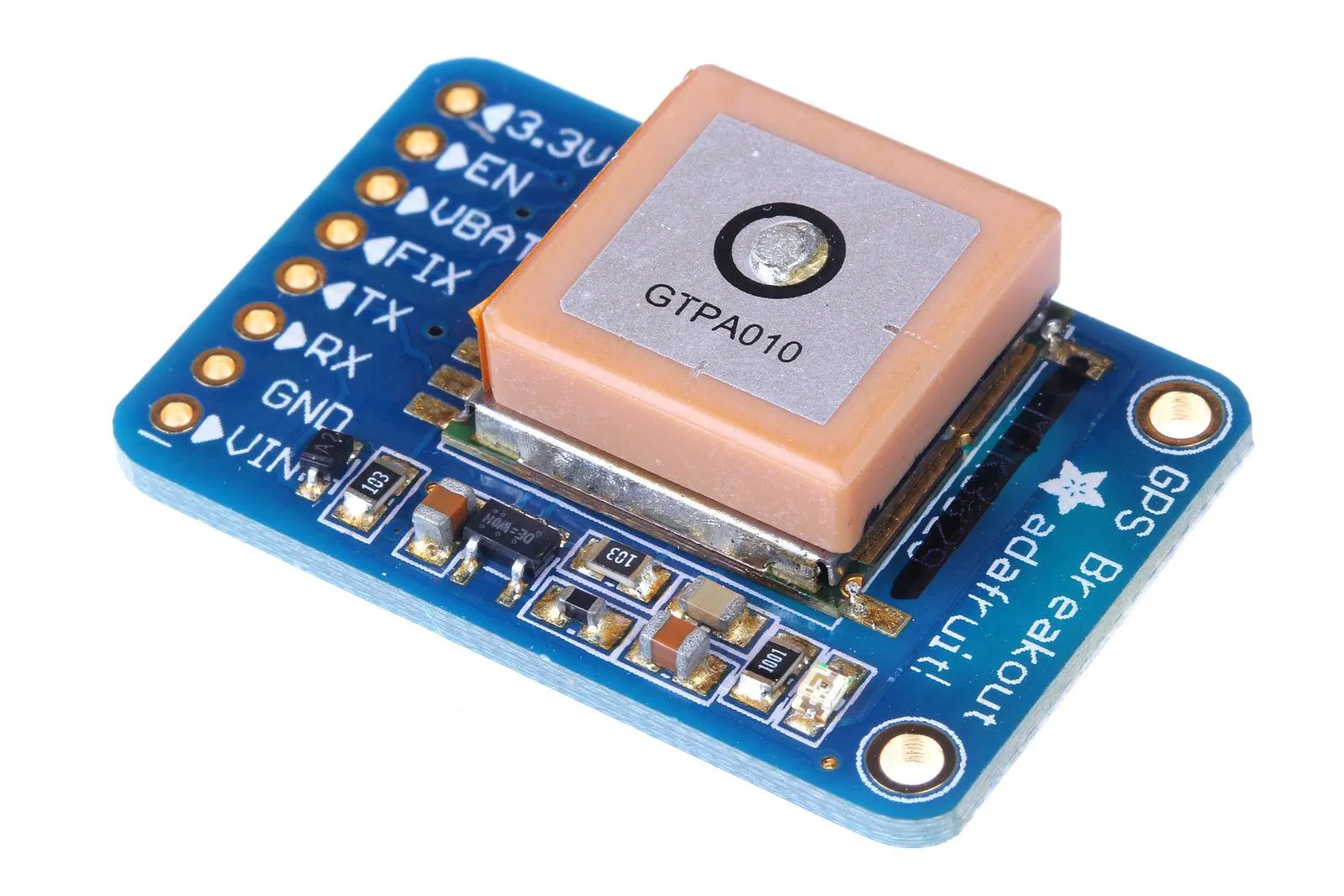
Moduł GPS
Źródło: Wikimedia Commons
Koniecznie należy pamiętać, że wyłącznik bezpieczeństwa GPS jest domyślnie włączony, co oznacza, że kontroler nie pozwoli na uzbrojenie pojazdu. Aby go wyłączyć i ponownie włączyć, należy nacisnąć i przytrzymać przez sekundę przycisk bezpieczeństwa.
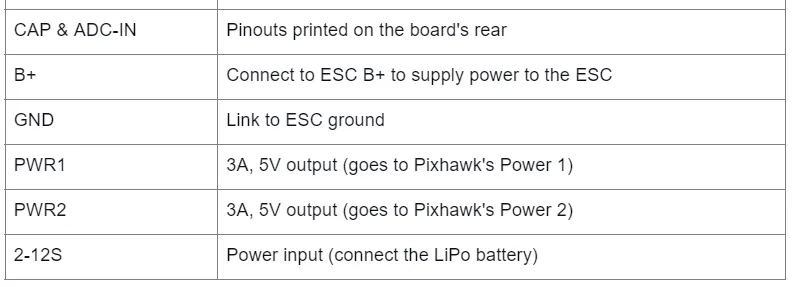
Zasilanie
Podłącz Pixhawk 4 Power Management Board w następujący sposób:
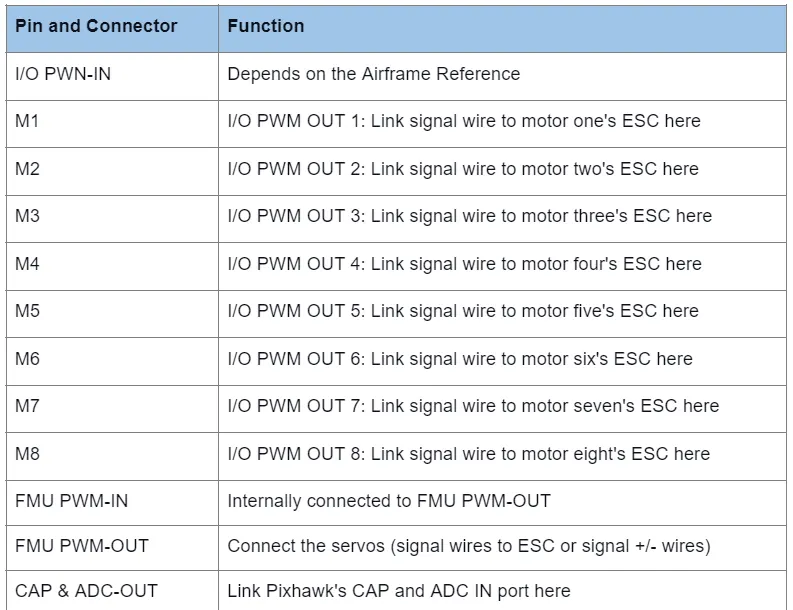
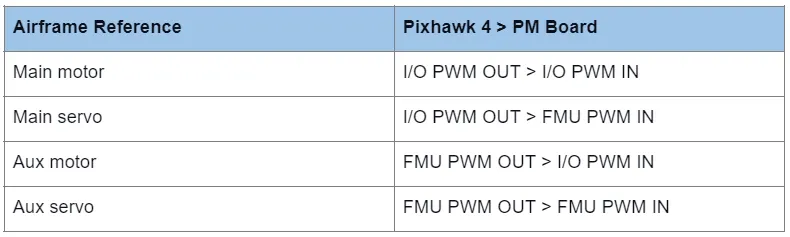
W zależności od referencji płatowca, oto jak podłączyć gniazda PWM OUT kontrolera do portów PWM IN Power Management Board.
Sterowanie radio
Sterowanie radiowe jest niezbędne do ręcznego sterowania dronem, ale nie jest wymagane podczas trybu lotu autonomicznego. Wybierz kompatybilny transceiver, a następnie podłącz go w następujący sposób:

Odbiorniki PPM i PWM z indywidualnymi kanałami przewodowymi muszą łączyć się z gniazdem PPM RC poprzez koder PPM.
Radia telemetryczne (opcja)
Radia telemetryczne pomagają w sterowaniu dronem i komunikacji w locie z kompatybilnej stacji naziemnej w celu zmiany instrukcji. Na przykład, możesz wysłać nową misję lub skierować ptaka w konkretne miejsce po wylądowaniu. Następnie należy podłączyć to radio do portu TELEM1.

Przenośna stacja kontroli naziemnej UAV
Źródło: Wikimedia Commons
Karta SD (opcja)
Jeśli potrzebujesz rejestrować i analizować szczegóły lotu, korzystać z magistrali UAVCAN lub przeprowadzać misje, zainstaluj dołączoną kartę SD, aby przechowywać te szczegóły.
Silniki
Zgodnie z instrukcją, podłącz serwomechanizmy lub silniki do gniazda głównego (I/O PWM OUT) lub pomocniczego (FMU PWM OUT). Należy jednak pamiętać, że mapowanie może nie być spójne w poszczególnych klatkach. Dlatego powinieneś użyć odpowiedniego mapowania dla każdego drona. Ponadto, jeśli twoja rama nie znajduje się na liście referencyjnej, użyj generycznego płatowca, aby dopasować go do swojego typu.

Silniki
Podsumowanie
Podsumowując, autonomiczne sterowanie dronami ma wiele zastosowań, takich jak badania terenowe, inspekcja infrastruktury, monitorowanie itp Pixhawk 4 jest kluczowym składnikiem jego rozwoju. Jeśli potrzebujesz kontrolera lub masz jakieś pytania dotyczące ustawień projektu, skontaktuj się z nami, aby uzyskać więcej informacji