NEMA 17 to jeden z najczęściej spotykanych formatów silników krokowych w drukarkach 3D, małych maszynach CNC, osiach liniowych i urządzeniach automatyki. Klasyczny silnik prądu stałego dobrze sprawdza się tam, gdzie liczy się ciągły obrót, ale nie zawsze wystarcza, gdy układ musi zatrzymać wał w określonej pozycji albo wykonać powtarzalny ruch o znany kąt. W takich zastosowaniach silnik krokowy pozwala sterować ruchem w dyskretnych krokach, bez skomplikowanego układu sprzężenia zwrotnego.
Poniżej wyjaśniamy, czym w praktyce jest NEMA 17, jakie parametry warto sprawdzić przed zakupem i jak bezpiecznie sterować takim silnikiem w projekcie elektronicznym.
Co to jest NEMA 17?
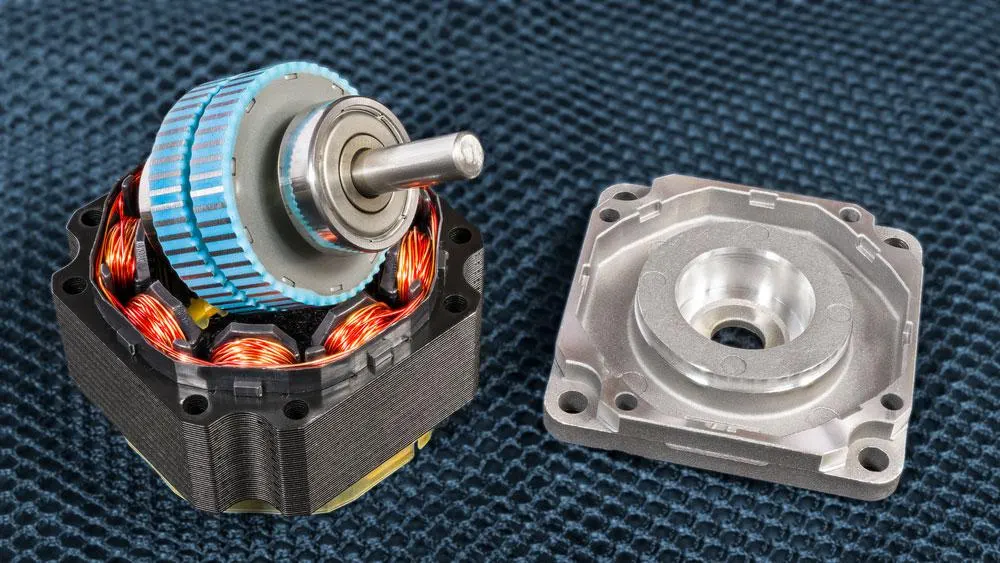
Rysunek 1: Rozebrane części elektrycznego silnika krokowego
NEMA 17 nie oznacza konkretnego producenta ani jednego modelu. To określenie rozmiaru kołnierza według standardu NEMA: przednia płaszczyzna montażowa ma około 1,7 cala, czyli 42,3 mm. W tym formacie występują różne silniki krokowe, najczęściej dwufazowe, o różnej długości korpusu, momencie trzymającym, prądzie fazy i sposobie wyprowadzenia przewodów.
Typowy NEMA 17 ma kąt kroku 1,8°, co daje 200 pełnych kroków na obrót. Wiele popularnych modeli ma moment trzymający w okolicach 3-5 kg·cm, ale dokładna wartość zależy od konkretnej konstrukcji. Dlatego przy projektowaniu nie należy opierać się wyłącznie na nazwie „NEMA 17”; trzeba sprawdzić kartę katalogową wybranego silnika.
W sprzedaży spotyka się wersje cztero-, sześcio- i ośmioprzewodowe. Cztery przewody oznaczają zwykle silnik bipolarny z dwiema cewkami. Wersje sześcio- i ośmioprzewodowe dają więcej możliwości połączeń, na przykład pracę z układem unipolarnym albo bipolarnym, zależnie od tego, które wyprowadzenia zostaną użyte.
W większości współczesnych projektów NEMA 17 pracuje ze sterownikiem bipolarnym, takim jak A4988, DRV8825, TMC2208 lub podobny układ z ograniczaniem prądu. Taki sterownik pozwala regulować prąd cewek i stosować mikrokroki, dzięki czemu ruch jest płynniejszy, a drgania mniejsze.

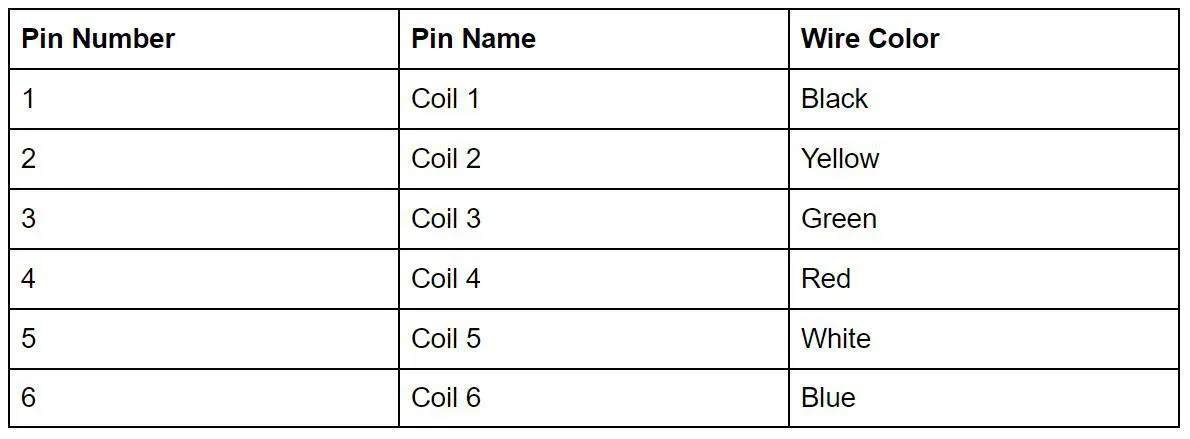
Rysunek 2: Zdemontowany silnik krokowy
W silniku krokowym najważniejsze są dwie fazy, czyli dwa uzwojenia. Kolory przewodów nie są uniwersalnym standardem, dlatego przed podłączeniem warto zidentyfikować pary cewek miernikiem. W silniku czteroprzewodowym dwie pary przewodów powinny mieć niską rezystancję między sobą, a brak połączenia z drugą parą.
Przykładowy układ wyprowadzeń silnika pokazano poniżej:
Cechy i specyfikacje NEMA 17

Rysunek 3: Koncepcja produkcji precyzyjnych silników
Cechy
Zamienia impulsy sterujące na przewidywalny ruch kątowy.
Zapewnia dobrą powtarzalność pozycjonowania bez enkodera.
Utrzymuje pozycję dzięki momentowi trzymającemu, gdy przez uzwojenia płynie prąd.
W wersji bipolarnej dobrze współpracuje z popularnymi sterownikami do drukarek 3D, ploterów i niewielkich osi CNC.
Ma kompaktowy rozmiar, ale oferuje moment wystarczający do wielu mechanizmów liniowych i obrotowych.
Specyfikacja
Kąt kroku: zwykle 1,8°.
Masa przykładowego silnika: około 350 g.
Prąd znamionowy przykładowego modelu: 1,2 A na fazę.
Średnica wału wyjściowego: często 5 mm.
Rozmiar kołnierza NEMA 17: około 42,3 × 42,3 mm; długość korpusu zależy od wersji, na przykład około 48 mm bez wału.
Popularna wersja bipolarna ma 4 przewody, często z przewodem o długości kilkudziesięciu centymetrów.
Moment trzymający przykładowego modelu: około 3,2 kg·cm, czyli 44 oz·in.
Napięcie znamionowe przykładowej cewki może wynosić około 4 V, ale w praktyce sterownik ogranicza prąd, a zasilanie układu bywa wyższe.
Dla podanej wersji prąd fazy 1,2 A przy rezystancji około 3,3 Ω odpowiada niskiemu napięciu cewki.
Długość korpusu typowych modeli NEMA 17 mieści się zwykle w zakresie od około 34 do ponad 48 mm.
Indukcyjność przykładowej cewki: około 2,8 mH.
Długość przewodów w wielu gotowych silnikach wynosi około 30 cm.
Typowe zasilanie sterownika w drukarkach 3D i małych maszynach to 12 V lub 24 V DC, przy ustawionym limicie prądu fazy.
Najczęściej jest to silnik 2-fazowy; w sterowaniu pełnokrokowym aktywne są kolejne stany uzwojeń.
Silnik o kącie 1,8° wykonuje 200 pełnych kroków na obrót.
Rezystancja fazy przykładowego modelu: około 3,3 Ω.
Wał wyjściowy jest zwykle podparty dwoma łożyskami kulkowymi.
Zakres temperatury pracy zależy od producenta; dla wielu modeli hobbystycznych przyjmuje się około -10 do 40°C.
W konfiguracji unipolarnej moment może być niższy niż w bipolarnej, dlatego w nowych projektach częściej wybiera się sterowanie bipolarne.
Jak korzystać z NEMA 17
Podłączenie NEMA 17 zaczyna się od identyfikacji cewek i dobrania sterownika do prądu silnika. Nie podłącza się takiego silnika bezpośrednio do pinów mikrokontrolera, ponieważ uzwojenia pobierają zbyt duży prąd. Mikrokontroler wysyła jedynie sygnały STEP i DIR, a właściwe zasilanie cewek realizuje sterownik mocy.
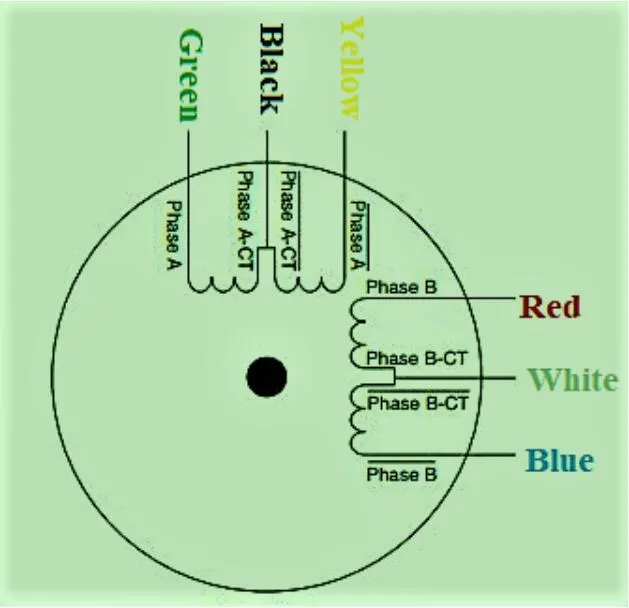
Rysunek 4: Przykładowy schemat uzwojeń silnika krokowego
Przed uruchomieniem ustaw limit prądu na sterowniku zgodnie z kartą katalogową silnika. Zbyt wysoki prąd szybko przegrzeje uzwojenia lub sam sterownik, a zbyt niski spowoduje gubienie kroków pod obciążeniem. W wersji czteroprzewodowej obie pary cewek podłącza się do wyjść sterownika. W wersji sześcio- lub ośmioprzewodowej należy wybrać konfigurację zgodną z dokumentacją silnika i sterownika.
Zastosowania
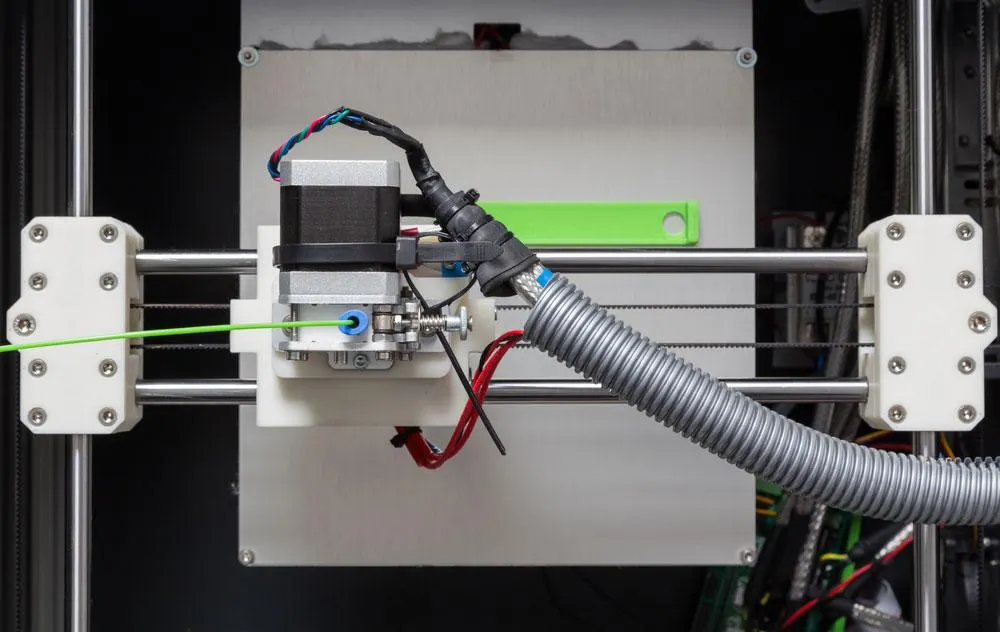
Rysunek 5: Drukarka 3D wykorzystująca silniki krokowe
Silniki krokowe NEMA 17 są wybierane tam, gdzie potrzebny jest powtarzalny ruch, łatwe sterowanie pozycją i rozsądny koszt układu. Nie zastępują serwonapędów w aplikacjach o dużej dynamice i pełnym sprzężeniu zwrotnym, ale w wielu urządzeniach pozwalają uzyskać wystarczającą dokładność przy prostszej elektronice.
Osie w niewielkich maszynach CNC.
Napędy osi X, Y i Z oraz ekstrudery w drukarkach 3D.
Napędy śrub pociągowych i pasków zębatych w modułach liniowych.
Precyzyjne mechanizmy pozycjonujące w przyrządach pomiarowych.
Starsze lub specjalistyczne mechanizmy wymagające kontrolowanego ruchu obrotowego.
Prototypy urządzeń typu RepRap, plotery i małe roboty kartezjańskie.
Małe plotery laserowe i systemy cięcia o niewielkiej mocy.
Na koniec
NEMA 17 jest praktycznym, łatwo dostępnym formatem silnika krokowego, ale sama nazwa nie wystarcza do poprawnego doboru napędu. Kluczowe są prąd fazy, moment trzymający, rezystancja i indukcyjność uzwojeń, długość korpusu oraz typ wyprowadzeń. Jeśli projektujesz sterownik, moduł zasilania lub płytkę do urządzenia z silnikami krokowymi, OurPCB może pomóc w przygotowaniu i montażu elektroniki sterującej. Prześlij pliki projektu i BOM; obowiązuje wycena w 12 godzin roboczych.