Silnik napędzający bieżnię to zwykle szczotkowy silnik prądu stałego o mocy od kilkuset watów do ponad 2 kW, rzadziej silnik prądu przemiennego. Aby płynnie zmieniać prędkość taśmy, potrzebny jest dedykowany sterownik. W tym artykule omawiamy typowe topologie schematu obwodu sterownika silnika bieżni, kluczowe podzespoły oraz wskazówki projektowe i montażowe, które warto znać przed wykonaniem własnej płytki drukowanej.
1. Obwód kontrolera prędkości oparty na PWM
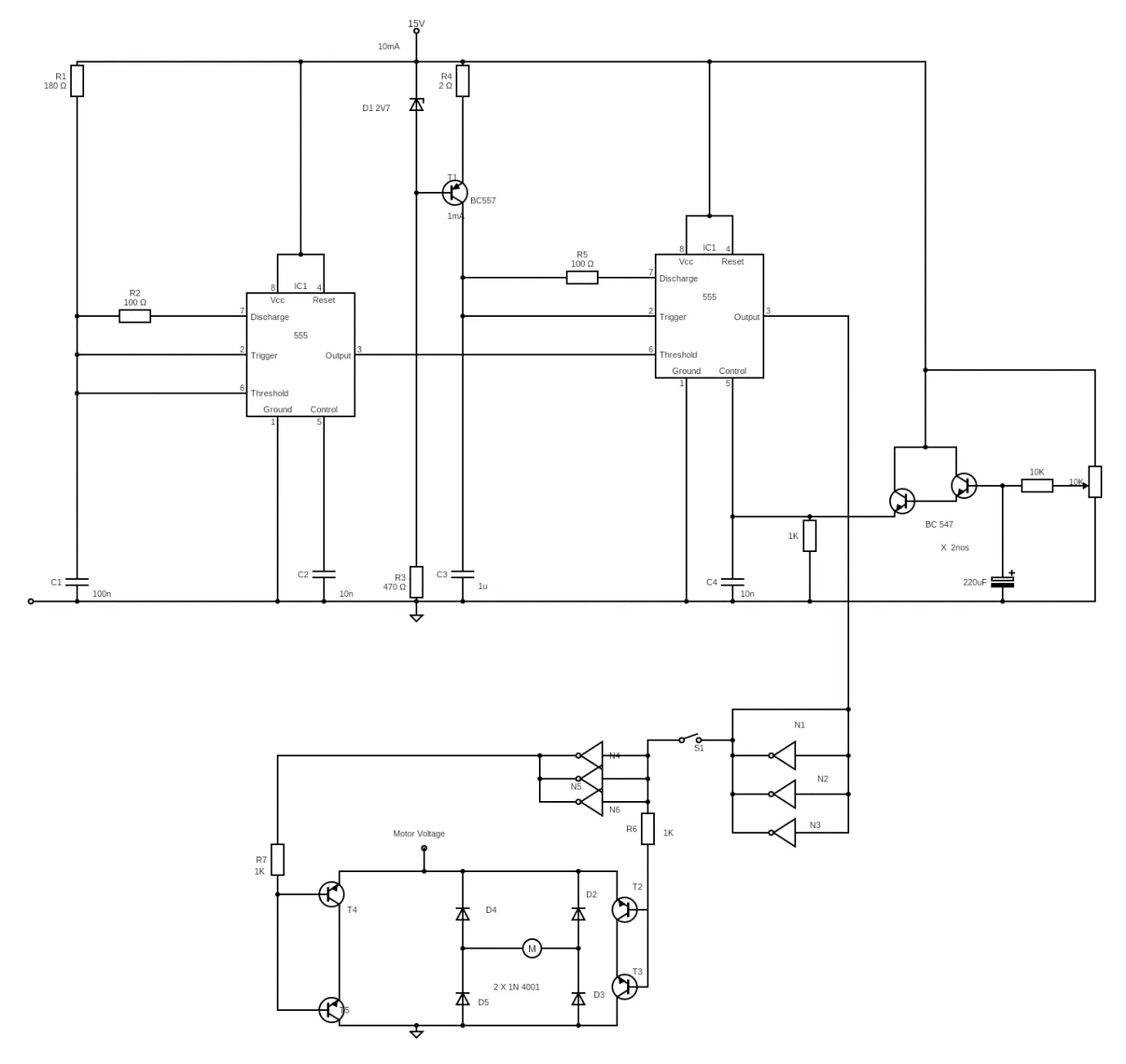
Najpopularniejszą metodą sterowania prędkością silnika DC bieżni jest modulacja szerokości impulsu (PWM). Zamiast obniżać napięcie liniowo (co marnowałoby energię w postaci ciepła), sterownik szybko włącza i wyłącza zasilanie silnika. Stosunek czasu załączenia do okresu, czyli współczynnik wypełnienia, decyduje o średnim napięciu, a tym samym o prędkości taśmy.
Sercem takiego układu jest generator PWM — może to być układ 555 pracujący jako multiwibrator astabilny, dedykowany sterownik silnika lub wyjście PWM mikrokontrolera (np. Arduino, STM32). Sygnał PWM steruje bramką tranzystora mocy MOSFET typu N (np. IRF540, IRFZ44N) lub tranzystora IGBT, który przełącza prąd silnika. Częstotliwość kluczowania dobiera się zwykle w zakresie od kilku do kilkudziesięciu kHz — wystarczająco wysoko, by uniknąć słyszalnego pisku, a jednocześnie ograniczyć straty przełączania.
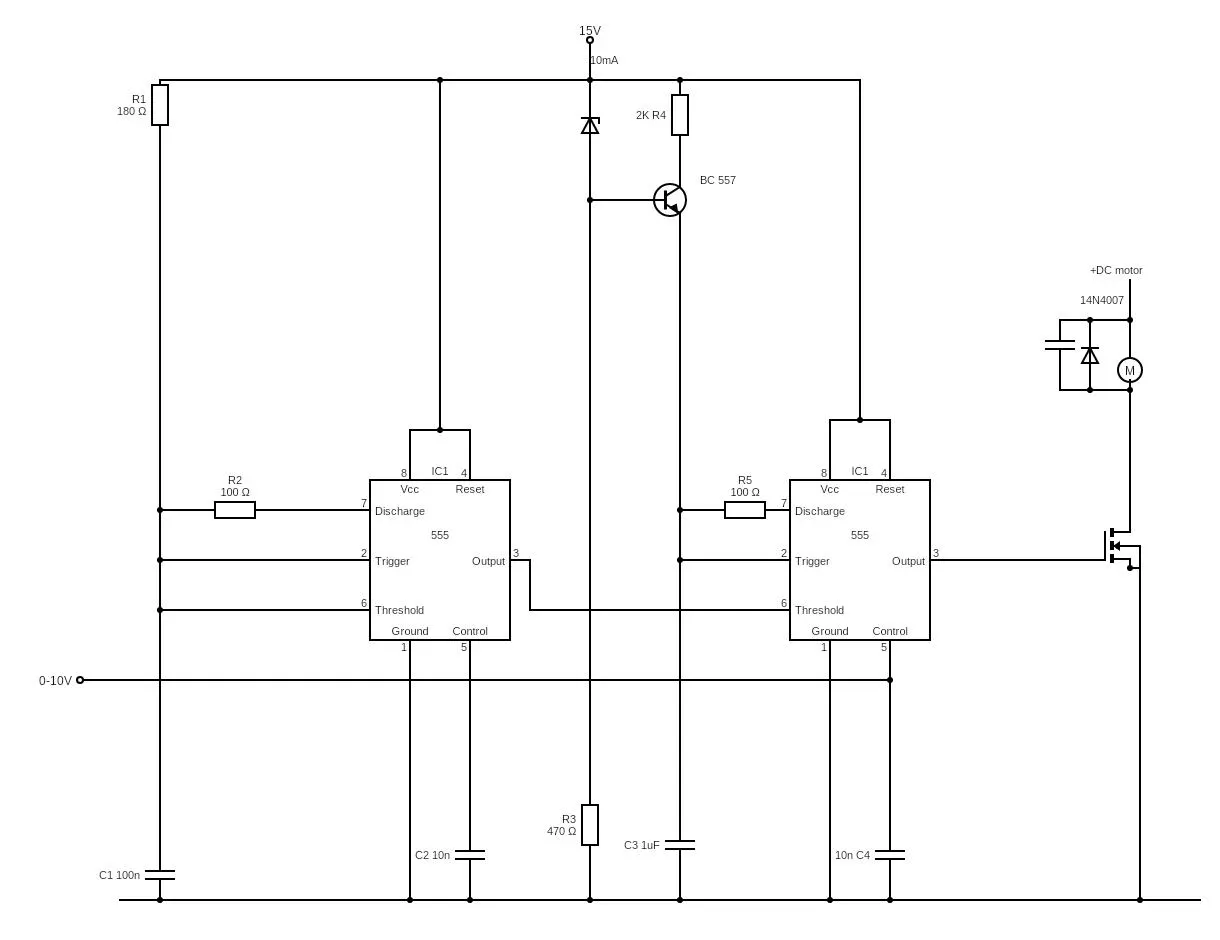
2. Uproszczony projekt sterownika bieżni
W najprostszym wariancie obwód składa się z kilku bloków funkcjonalnych:
- Zasilacz — prostownik mostkowy z kondensatorem filtrującym, dostarczający napięcie DC dla silnika (często 90–180 V dla większych bieżni).
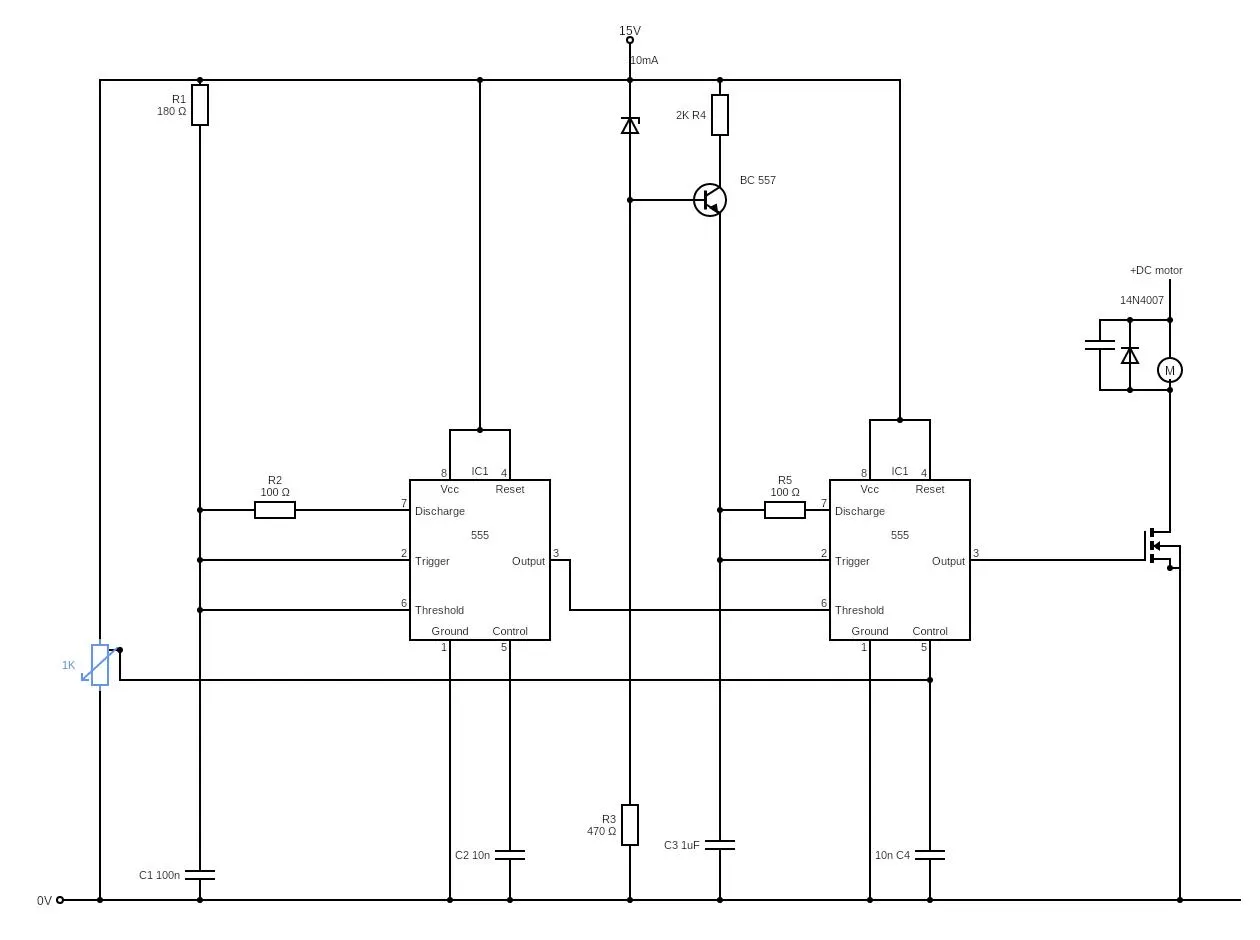
- Generator PWM — potencjometr ustawia współczynnik wypełnienia, a tym samym prędkość.
- Stopień mocy — MOSFET lub IGBT z diodą zwrotną (freewheeling) chroniącą przed przepięciami od indukcyjności uzwojeń silnika.
- Pętla sprzężenia zwrotnego — w bieżniach z regulacją obciążenia czujnik prądu lub tachoprądnica utrzymuje stałą prędkość niezależnie od ciężaru biegacza.
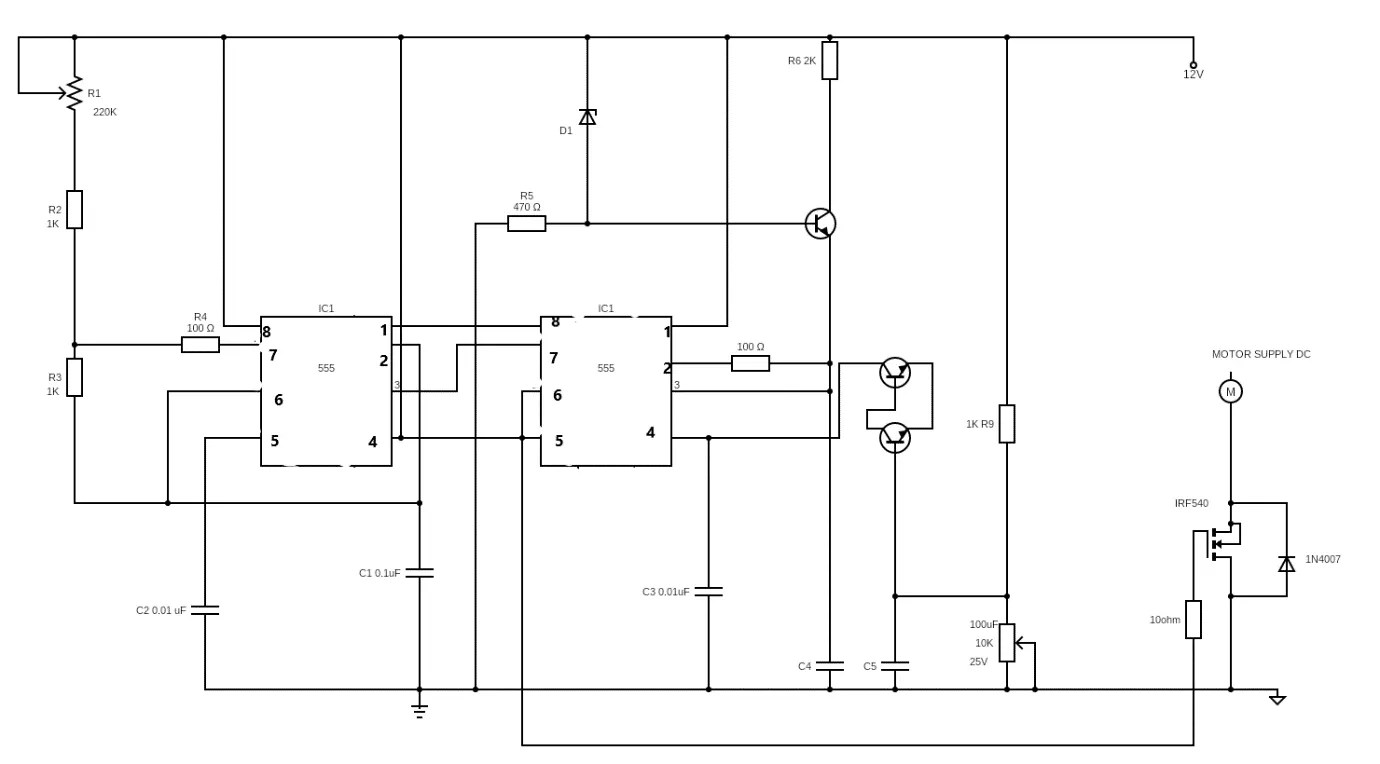
3. Sterowanie z zewnętrznego źródła zasilania
Jeżeli budujesz prototyp lub testujesz silnik na stanowisku, możesz zasilać układ sterujący (logikę) z osobnego, izolowanego źródła niskiego napięcia, np. 12 V, podczas gdy stopień mocy korzysta z głównej szyny DC. Rozdzielenie zasilania logiki i mocy poprawia odporność na zakłócenia i ułatwia diagnostykę. W takiej konfiguracji konieczne jest wspólne odniesienie masy (GND) oraz — w przypadku wyższych napięć — optoizolacja sygnału bramkowego dla bezpieczeństwa.
4. Obwód ściemniacza fazowego (chopper)
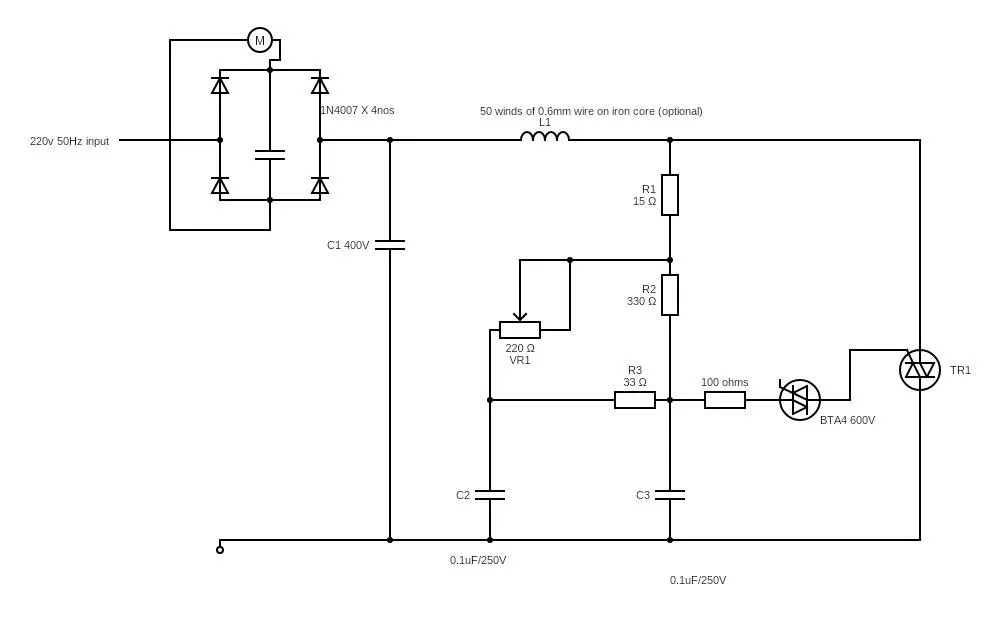
Alternatywą dla PWM po stronie DC jest sterowanie fazowe po stronie AC z użyciem triaka i układu wyzwalającego (np. DIAC lub dedykowany kontroler). Triak przewodzi tylko przez część każdego półokresu sieci — opóźnienie kąta wyzwolenia reguluje moc dostarczaną do silnika. Rozwiązanie to jest tańsze, ale generuje więcej zakłóceń EMI i wymaga filtra przeciwzakłóceniowego (dławik plus kondensator) na wejściu.
Kluczowe podzespoły sterownika
Niezależnie od wybranej topologii, schemat sterownika silnika bieżni opiera się na kilku stałych elementach. Tranzystor mocy (MOSFET lub IGBT) odpowiada za kluczowanie prądu silnika i to on rozprasza najwięcej ciepła — dlatego dobiera się go z zapasem napięciowym i prądowym, zwykle 1,5–2× względem wartości roboczych. Driver bramki zapewnia szybkie ładowanie i rozładowanie pojemności bramki, co skraca czas przełączania i ogranicza straty. Dioda zwrotna (lub dioda wewnętrzna MOSFET-a) przejmuje prąd indukcyjny uzwojeń w fazie wyłączenia.
W bardziej rozbudowanych sterownikach pojawia się czujnik prądu (rezystor pomiarowy lub czujnik halotronowy) oraz układ ograniczenia prądu, który chroni stopień mocy przy zablokowaniu taśmy. Mikrokontroler nadzoruje rampę rozruchu, płynne hamowanie i zabezpieczenia, a wyświetlacz oraz panel sterujący komunikują się z nim po magistrali. Taka architektura pozwala uzyskać stabilną prędkość niezależnie od ciężaru biegacza i nachylenia bieżni.
Wskazówki projektowe i montażowe
- Stopień mocy wymaga skutecznego odprowadzania ciepła — zaplanuj radiator i odpowiednie pole miedzi na płytce.
- Ścieżki prądowe silnika prowadź szeroko i krótko; oddziel je od delikatnej części sterującej, by ograniczyć sprzężenia.
- Dioda zwrotna i snubber RC przy MOSFET-cie są obowiązkowe — bez nich szpilki napięciowe od indukcyjności silnika mogą uszkodzić tranzystor.
- Dla układów zasilanych z sieci pamiętaj o odpowiednich odstępach izolacyjnych (creepage/clearance) między sekcją wysokiego i niskiego napięcia.
FAQ
Czy mogę zastąpić MOSFET tranzystorem bipolarnym? Można, ale przy wyższych prądach MOSFET ma niższe straty przewodzenia i nie wymaga stałego prądu bazy, dlatego jest preferowany.
Jaka częstotliwość PWM jest najlepsza? Kompromisem jest zakres 15–25 kHz: eliminuje słyszalny pisk i utrzymuje rozsądne straty przełączania dla typowych silników DC bieżni.
Wniosek
Schemat sterownika silnika bieżni można zrealizować na kilka sposobów — od prostego PWM z układem 555 po sterowanie fazowe triakiem. Kluczem jest właściwy dobór stopnia mocy, ochrona przeciwprzepięciowa i staranny layout płytki drukowanej.
Masz gotowy schemat sterownika i potrzebujesz niezawodnej produkcji? Zleć montaż PCB w OurPCB — wycena w 12 godzin roboczych. Sprawdź też nasze możliwości produkcyjne.